





 do pracy w ciasnych przestrzeniach.")










 do pracy w ciasnych przestrzeniach.")






")
Unitree G1 Edu – U2: humanoidalna platforma R&D z 7-osiowymi ramionami i 3-osiową talią (29 DOF)

 Zadzwoń i zamów
Zadzwoń i zamów





Opis
⭐⭐ Unitree G1 Edu – U2: humanoidalna platforma R&D z 7-osiowymi ramionami i 3-osiową talią (29 DOF)
Unitree G1 Edu – U2 znacząco rozszerza możliwości ruchowe bazowego G1, podnosząc elastyczność i dynamikę całego korpusu. 7-osiowe ramiona i 3-osiowa talia umożliwiają naturalne ruchy tułowia, lepsze zarządzanie balansem oraz trajektorie omijające przeszkody. Łącznie 29 DOF czyni U2 sprawną platformą do badań nad planowaniem ruchu i manipulacją w ciasnych przestrzeniach, z zachowaniem otwartej architektury i mocy obliczeniowej dla AI.
Najważniejsze korzyści w skrócie
- U2 = zwiększona mobilność korpusu – 29 DOF dla precyzyjnych, płynnych ruchów.
- 3-osiowa talia – bardziej naturalne pochylanie/rotacja tułowia i lepsza kontrola środka masy.
- 7-osiowe ramiona – złożone trajektorie, sięganie „wokół przeszkód”, większa swoboda orientacji końcówki.
- Moc dla AI – port rozszerzeń z wydajnością obliczeniową 100 TOPS do inferencji na brzegu.
- Większa siła (Edu) – moment kolana do 120 N·m; udźwig ramienia do 3 kg.
- Otwarta architektura – wsparcie rozwoju low-/high-level, pełna kontrola zachowań, szybkie POC ⏩.
Dlaczego G1 Edu – U2?
Planowanie ruchu i manipulacja w ciasnych przestrzeniach
Kombinacja 3-osiowej talii i 7-osiowych ramion poprawia zasięg robota w pobliżu przeszkód, umożliwia separację pozycji od orientacji oraz efektywne strategie regraspingu bez konieczności przestawiania całego korpusu.
Stabilizacja i balans w czasie rzeczywistym
Dodatkowe DOF w talii wspierają kontrolę równowagi i kompensację momentów podczas pracy ramion. To kluczowe przy dokładnym pozycjonowaniu i operacjach wymagających długiego zasięgu.
Otwarte API i rozszerzalność
- Low-level & high-level – dostęp do warstw sterowania i bibliotek wysokopoziomowych.
- Port rozszerzeń (100 TOPS) – integracja dodatkowych sensorów/kamer/akceleratorów AI.
- Dokumentacja + przykłady – krótszy czas od pomysłu do prototypu.

Przykładowe zastosowania
- Planowanie ruchu w ograniczonej przestrzeni – sięganie między/za przeszkody, manipulacja „z łokciem dookoła”.
- Precyzyjne montażowe/serwisowe zadania – orientacja końcówki przy zachowaniu trajektorii.
- HRI – bezpieczne, przewidywalne ruchy korpusu dzięki dodatkowym DOF talii.
- Didaktyka i laboratoria – kursy robotyki, projekty dyplomowe, pilotaże wdrożeń.
⚙️ Specyfikacja (wybrane parametry)
| Parametr | Wartość |
|---|---|
| Wariant | G1 Edu – U2 (rozszerzona kinematyka korpusu) |
| Stopnie swobody (DOF) | 29 |
| Talia | 3 osie (rotacja/pochylenie/odchylenie) |
| Ramiona | 7 osi każde (trajektorie omijające, bogata orientacja końcówki) |
| Moc obliczeniowa AI | port rozszerzeń do 100 TOPS |
| Moment kolana (Edu) | do 120 N·m |
| Udźwig ramienia | do 3 kg |
| Architektura | otwarta – wsparcie rozwoju low-/high-level, API, dokumentacja |
| Przeznaczenie | R&D, edukacja, prototypowanie AI/HRI; manipulacja i planowanie ruchu w ciasnych przestrzeniach |
Cechy produktu
Roboty
- Zastosowanie badania naukowe, rozwój AI, testy robotyki humanoidalnej, interakcja człowiek–robot
- Seria modelu Unitree G1 EDU - U2
- Konstrukcja humanoidalna, składana, z wewnętrznym prowadzeniem okablowania
- Liczba stopni swobody (DoF) 29 DOF
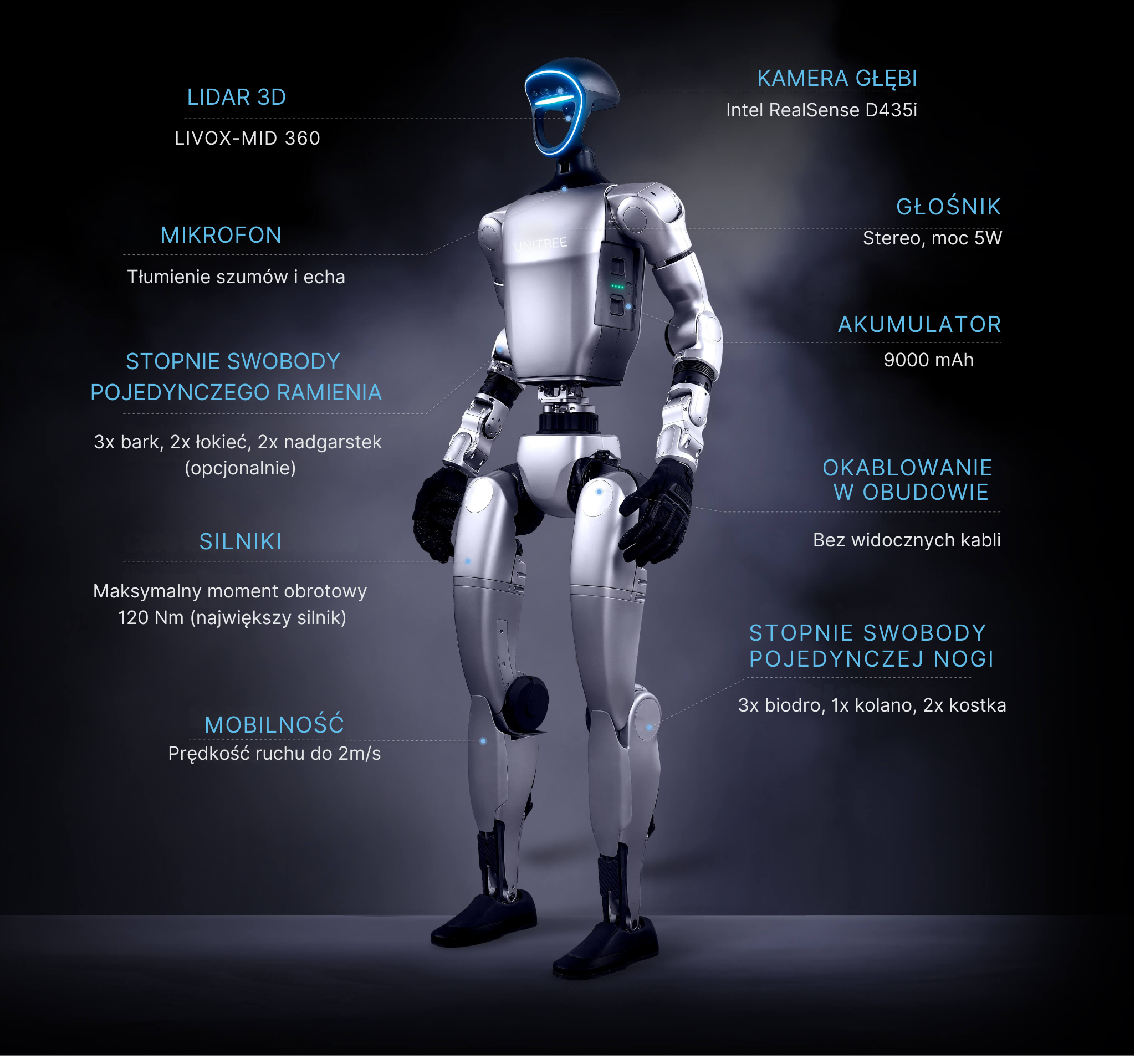
- Maksymalny moment obrotowy silników do 120 Nm
- Maksymalna prędkość poruszania się 2 m/s
- Czas pracy na jednym ładowaniu około 2 godziny
- Zasilanie akumulator litowo-jonowy 54 V
- Typ baterii 9000 mAh, szybka wymiana (quick-release), 13 ogniw
- Główne sensory kamera głębi, 3D LiDAR LIVOX MID360, IMU
- System śledzenia skanowanie 360° + percepcja głębi + AI do nawigacji i wykrywania przeszkód
- Łączność bezprzewodowa Wi-Fi 6, Bluetooth 5.2
- Kompatybilność z ROS tak, pełne wsparcie dla ROS i ROS 2
- Programowanie Python, C++, środowisko ROS
- Interakcja głosowa tak, matryca 4 mikrofonów + głośnik stereo 5W
- Wysokość robota 132 cm (pozycja stojąca)
- Waga robota około 35 kg
- Tryby ruchu chodzenie, bieganie, stanie, manipulacja ramionami, wchodzenie po schodach
- Zdalne sterowanie tak, z użyciem dedykowanego kontrolera manualnego

